ROBO-AO IFS
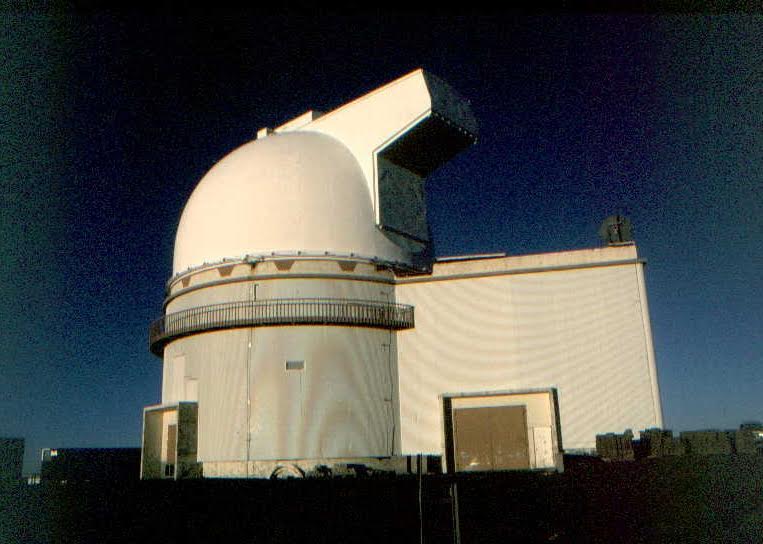
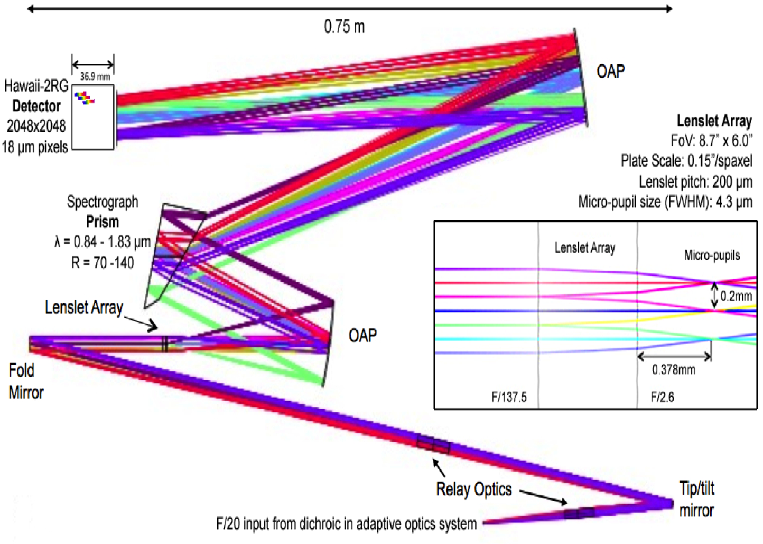
Our team is in the conceptual design phase (CDP) developing an integral field spectrograph to work with a robotic adaptive optics (AO) system being designed by Christoph Baranec and group at University of Hawaii (UH). The Robo-AO is being designed for the UH 2.2-m telescope with a robotic laser adaptive optics system to boost the infrared sensitivity by mitigating the blurring effects of our atmosphere. The OIRlab team has been designing a near-infrared integral field spectrograph (IFS) that takes advantage of the Robo-AO system and high-performance. The Robo-AO-IFS is designed to have an average spectral resolution of R~100 that simultaneously covers the near-infrared band pass from 840 to 1830 nm with a spatial sampling of 0.15″ per spaxel. The spectrograph is designed to have no moving opto-mechanical mechanisms (e.g., filter or grating stages) to reduce the overall complexity and cost of the instrument, and to allow for stable spectra for quick data reduction routines that work with the Robo-AO system.
One of the leading science cases for the Robo-AO-IFS system is quick characterization of transients like supernova. A near-infrared IFS will provide a crucially missing is complementary real-time infrared spectra to determine the level of extinction towards transient events, and produce robust distances to SNIa standard candles. The Robo-AO-IFS will also be beneficial for characterizing the near-Earth asteroids and understanding their composition. For more about this instrument program, see Baranec et al. 2016.